G-PAL Driving Assistance System Solutions

Slide Down
Advantages

All-Weather & All-Time Performance

High Cost-Effectiveness

Unified Software-Hardware Architecture

High Safety & Reliability

Scalable ODD

Modularized Delivery
Application Scenarios


G-PAL Driving-Parking Integrated Driving Assistance System
High Performance & HD-Map Free
11V5R Mid-high Compute Domain Controller
(J6M/2*J6M/MDC 510Pro/MDC 610/Orin X)
Delivers better computational performance capable of supporting ADAS applications
including Urban NOA, empowering the market competitiveness of OEMs.

4D Imaging Front Radar
4D Imaging Corner Radar
Front View Long-Focal Camera
Front View Wide-Angle Camera
Rear View Camera
Surround View Camera
Side View Camera
Domain Controller

D2D

Urban NOA

Highway NOA

Roundabout Navigation
General Obstacle Avoidance

Unprotected Left Turn
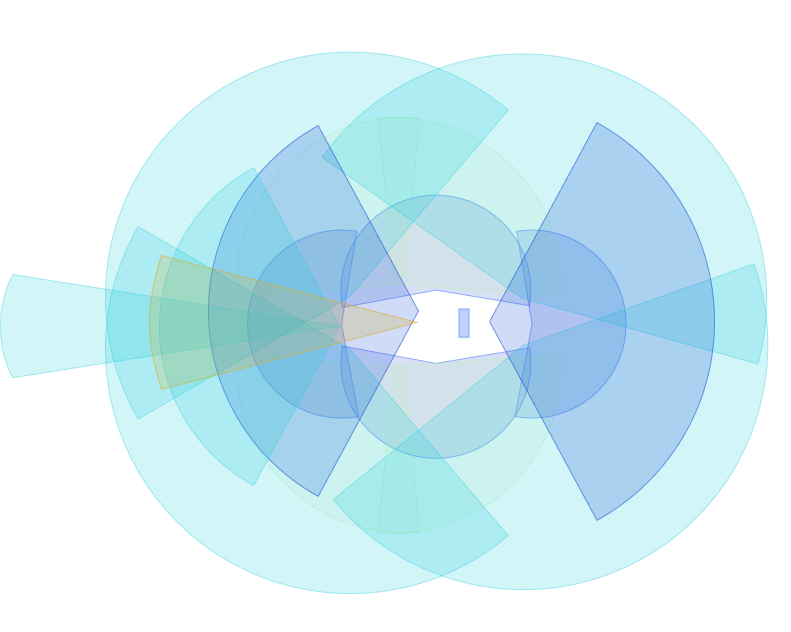
11V
Front view: 8MP *2
Rear view: 3MP *1
Surround view: 3MP *4
Side view: 3MP *4
5R
4D imaging front radar (FR6C) *1
4D imaging corner radar (CR6C) *4
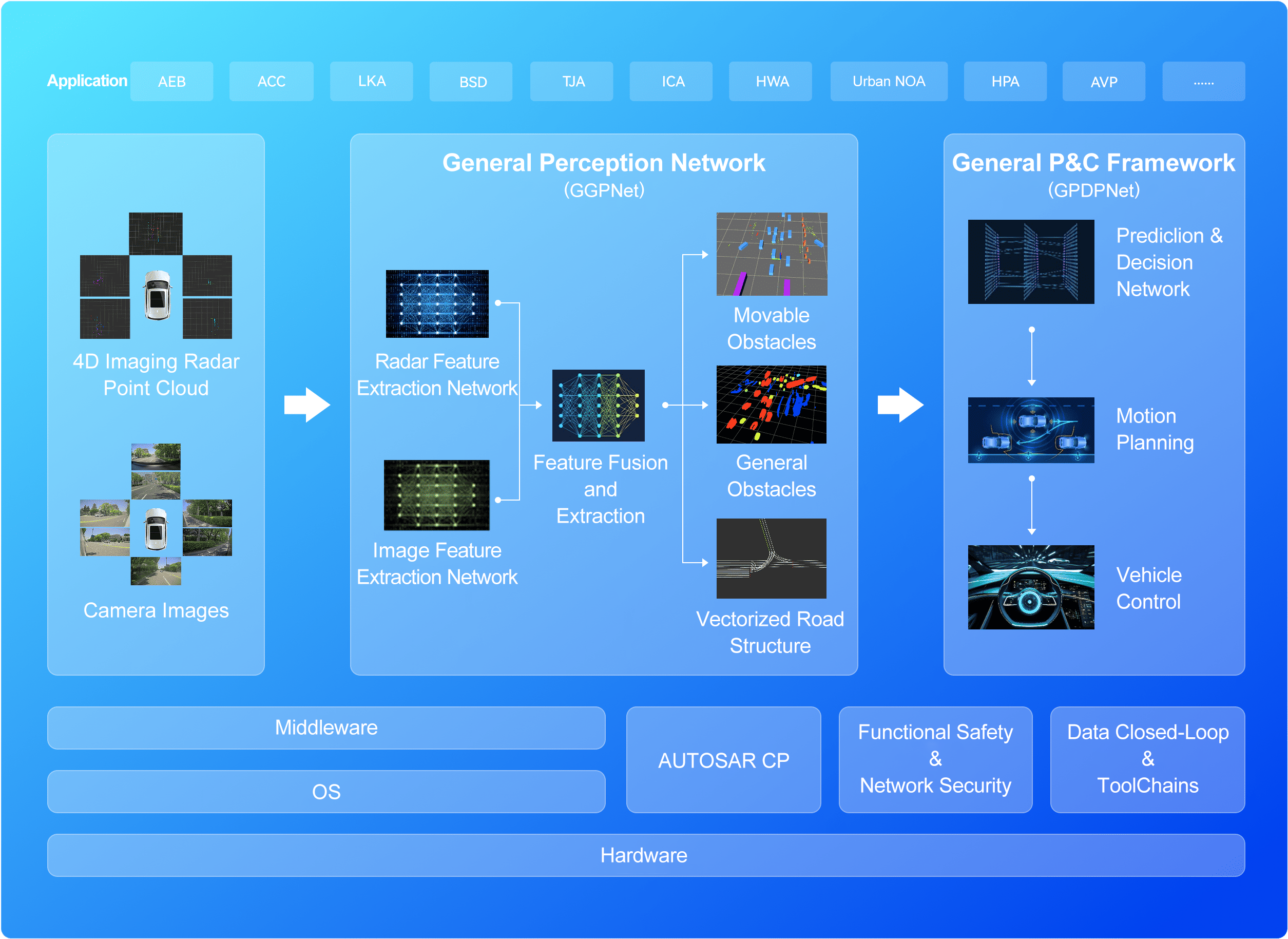
Software Architecture
Functions

Watch video

Watch video

Watch video

Watch video

Watch video

Watch video

Watch video
创新技术






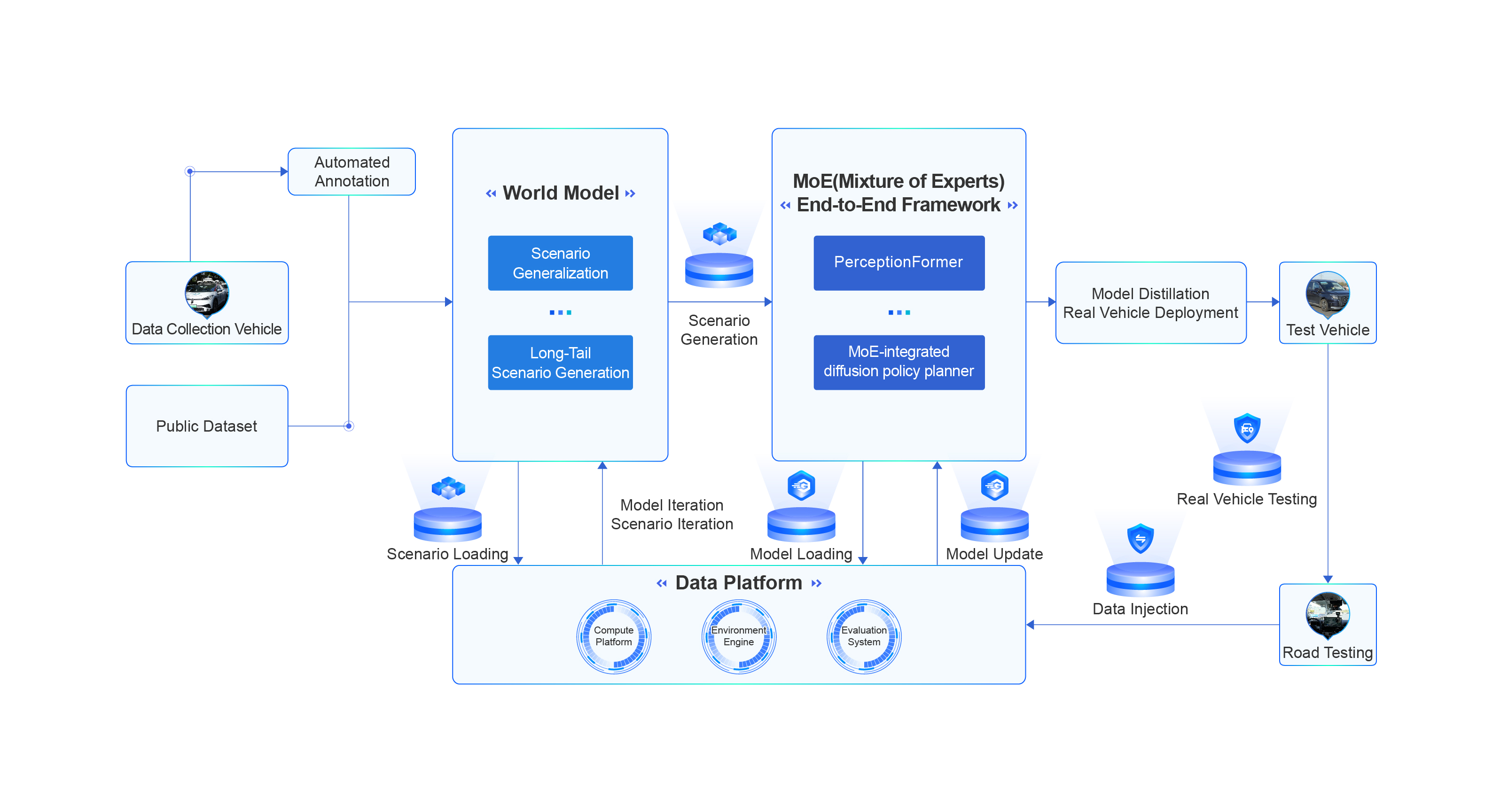
World Model and Large Model Coupling-Driven End-to-End Technology
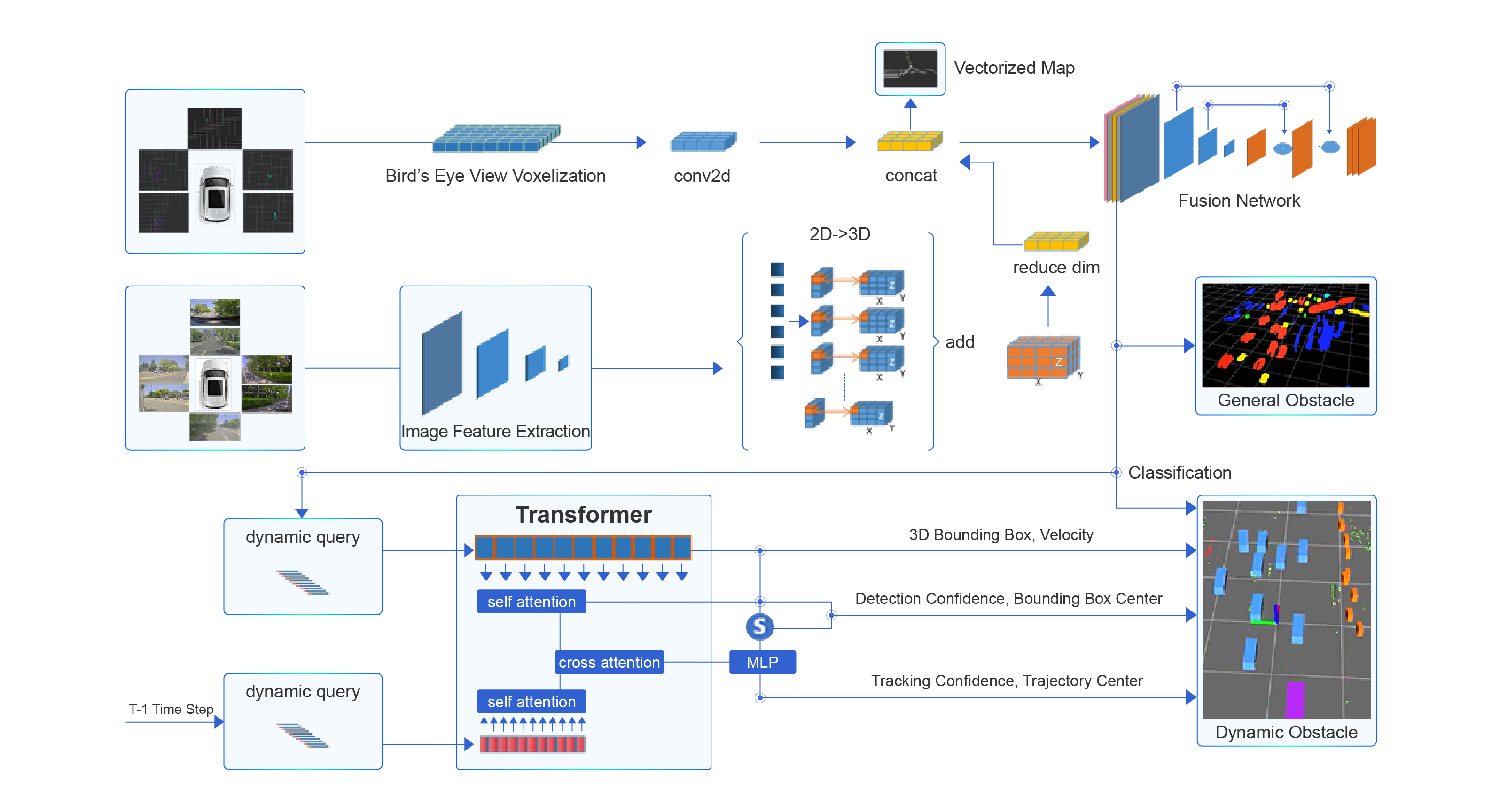
GGPNet: G-PAL Generalized Perception Network
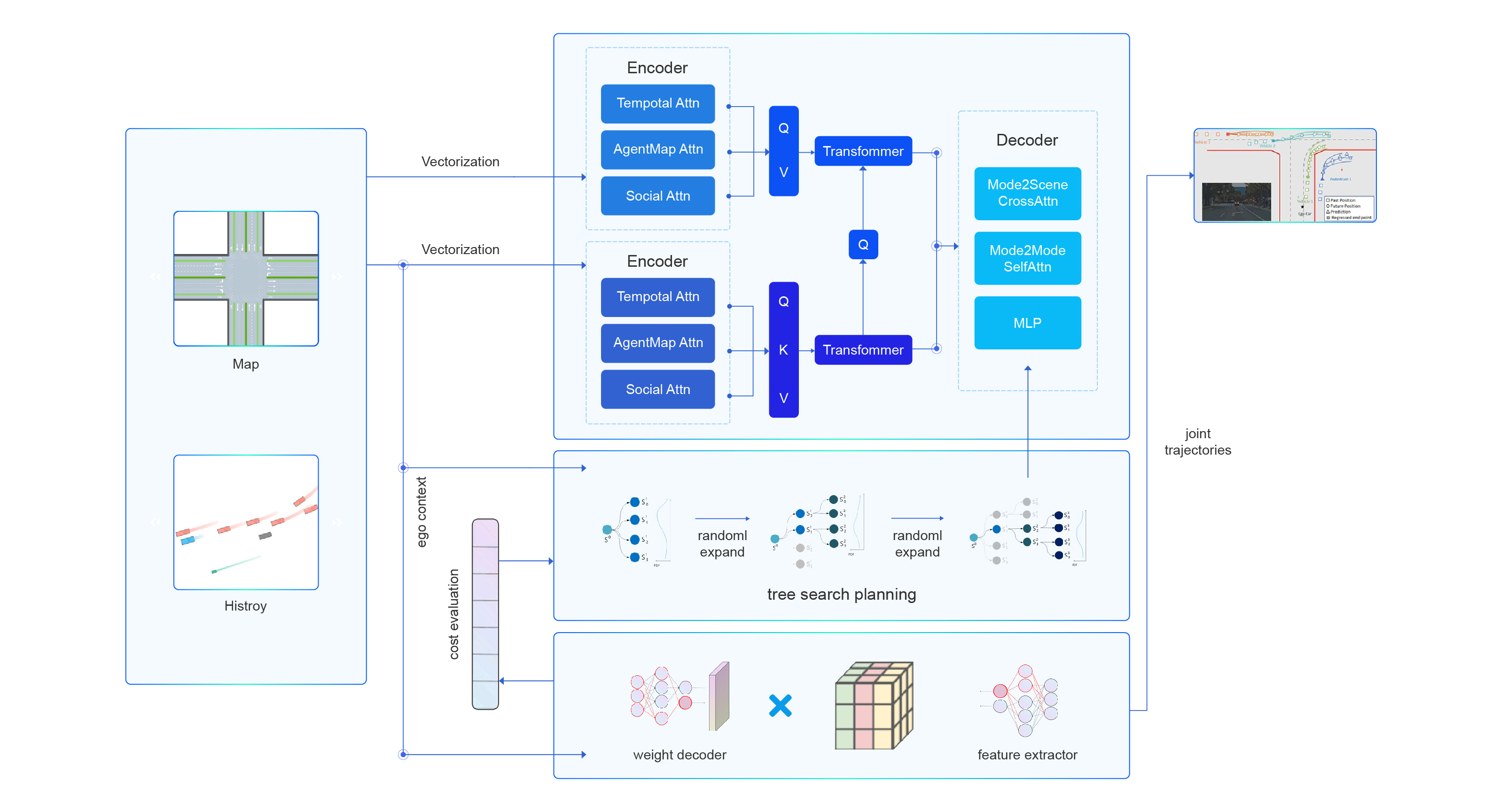
Integration Strategy of Predictive Decision-Making Network Model and MCTS Decision Tree
360° "Vision+4D mmWave Imaging Radar" Dynamic/Static Perception & General Obstacle Detection
High-Robustness and High-Reliability Planning and Control Framework
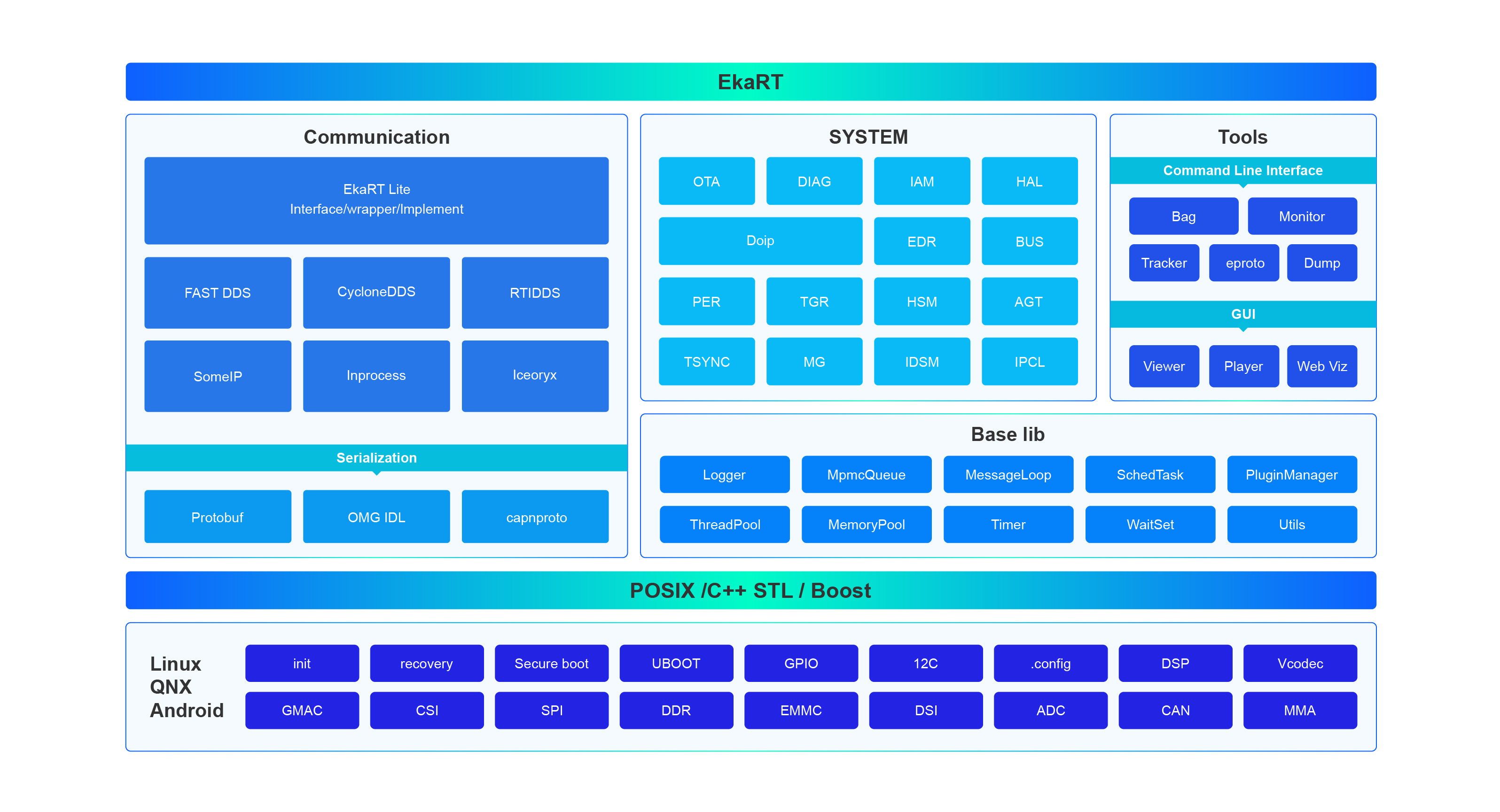
EkaRT: Cross-Domain Multi-Platform Middleware
Watch video

Watch video